Hello lovely people! Good morning, good afternoon, good evening! Wherever you are, we hope you’re doing fantastic and staying safe!
First of all, we’d like to apologize for being so M.I.A.! School caught up with us but we’re back and ready to guide you through the rest of our journey through this course. Last time, we took you through our brainstorming process and some of the ideas that we came up with. Now, we’re going to let you know how we narrowed down our (extremely long) list to 4 ideas, and then how we selected the final ideas per subsystem.
TL;DR

Subsystem 1: The Robot
There were a lot of ideas that fell under this subsystem and, honestly, we were at a loss at to what to choose. All of them seemed like good ideas, and we were interested to implement them all. However, we had to make a decision. We narrowed down this list to 4 ideas mostly based on feasibility and time. The five ideas that made it to the next round are listed below (the winner is in bold):
- A robot that plots coordinates and moves to those coordinates to teach the students a little about coordinate geometry
- An obstacle avoidance robot
- A robot that indicates temperature on a physical scale
- A robot that indicates light intensity on a physical scale
We chose the idea in bold because it does something that makes the work more valuable. It teaches the user a concept that they can apply even in their schoolwork. In addition, the other three ideas need sensors, and obtaining sensors might be expensive or difficult.
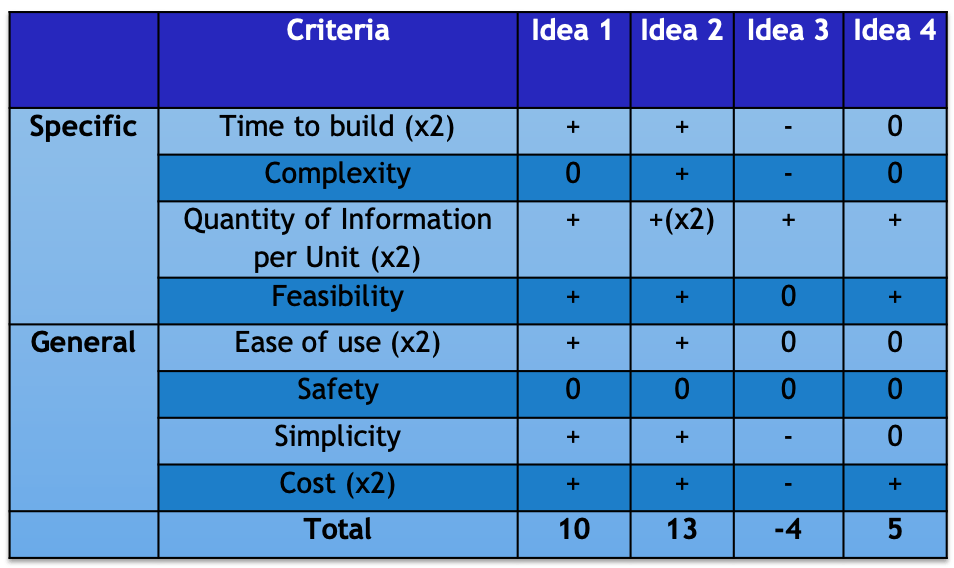
The design requirements and selection criteria are included below in the form of a Pugh chart. A Pugh chart is essentially a table that helps you evaluate your ideas based on the design requirements you created earlier in the design cycle.

Subsystem 2: The Teaching Medium Subsystem
The five ideas that made it to the next round are listed below (the winner is in bold):
- Writing tutorials on flash cards that could be used to reinforce information
- Creating a picture manual with as little text as possible
- Creating animations of the robot assembly
- Sharing content and tutorials via a YouTube channel
We chose the idea in bold because it seems like a fun idea to do (not to mention it was the winner of the Pugh chart!). In addition, the major factors we considered were time, simplicity, and cost. We realized that when scaling, the other ideas might be too complex to create for a large number of tutorials.