Greetings again from our homes! How are you all doing? We hope you’re doing great.
It feels like just yesterday we began this journey with you, creating blog posts that detailed our every step. Now, we’re drawing close to the end. Indeed, we have run the good race and fought the good fight. If you’ve been following thus far, why not drop a comment or even a “hi”? We’ll be looking out 😀
Well, it’s that time of the semester when final projects are due and whew! What a ride it was been. This team has been amazing to work with, and I’ve (Tamisha) enjoyed every last second of it. Without further ado, here are our final deliverables! We hope you’ll see how these designs have grown over the course of the past couple of weeks.
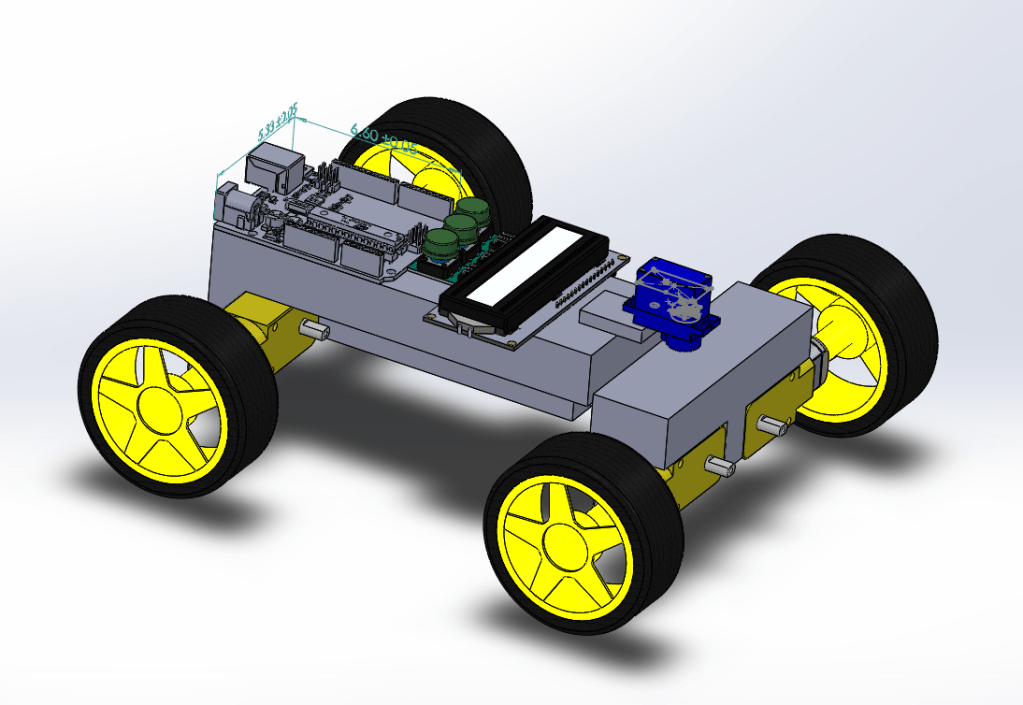
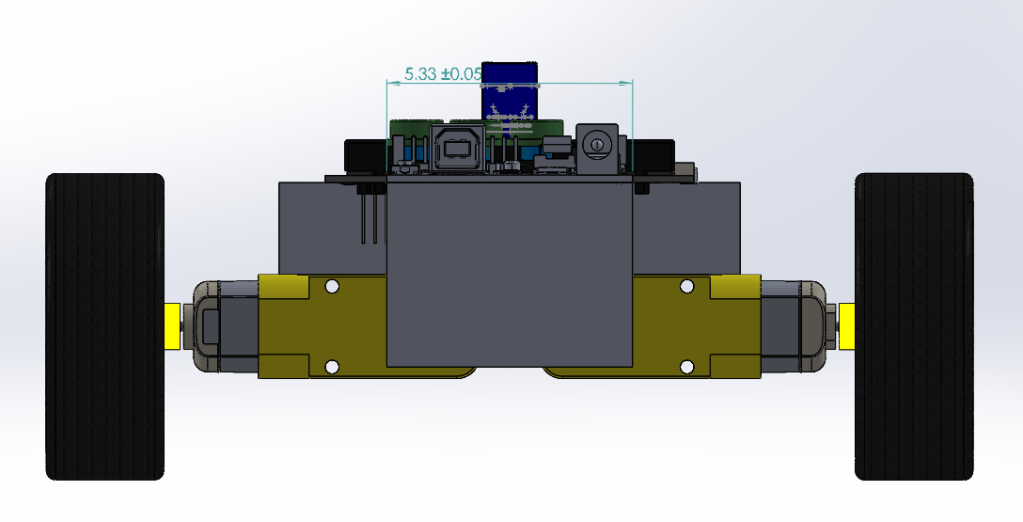
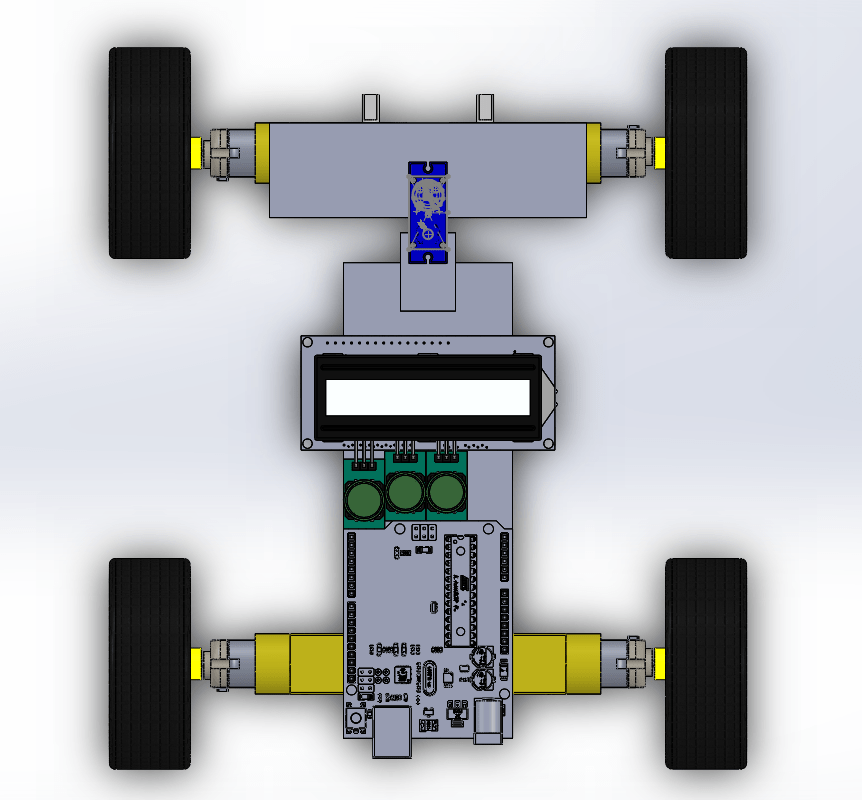
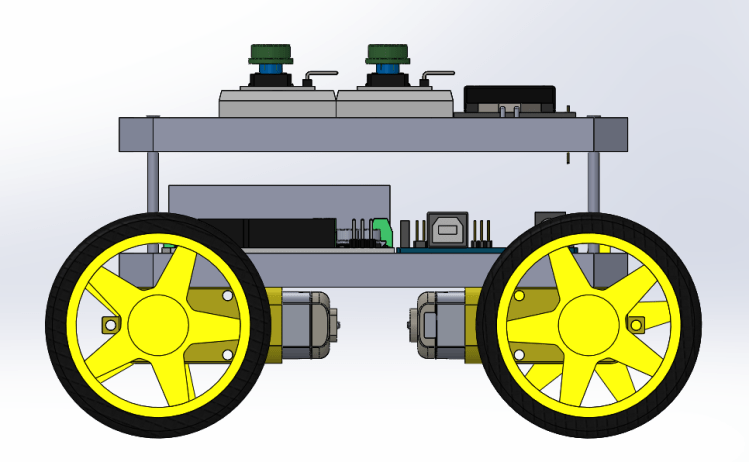
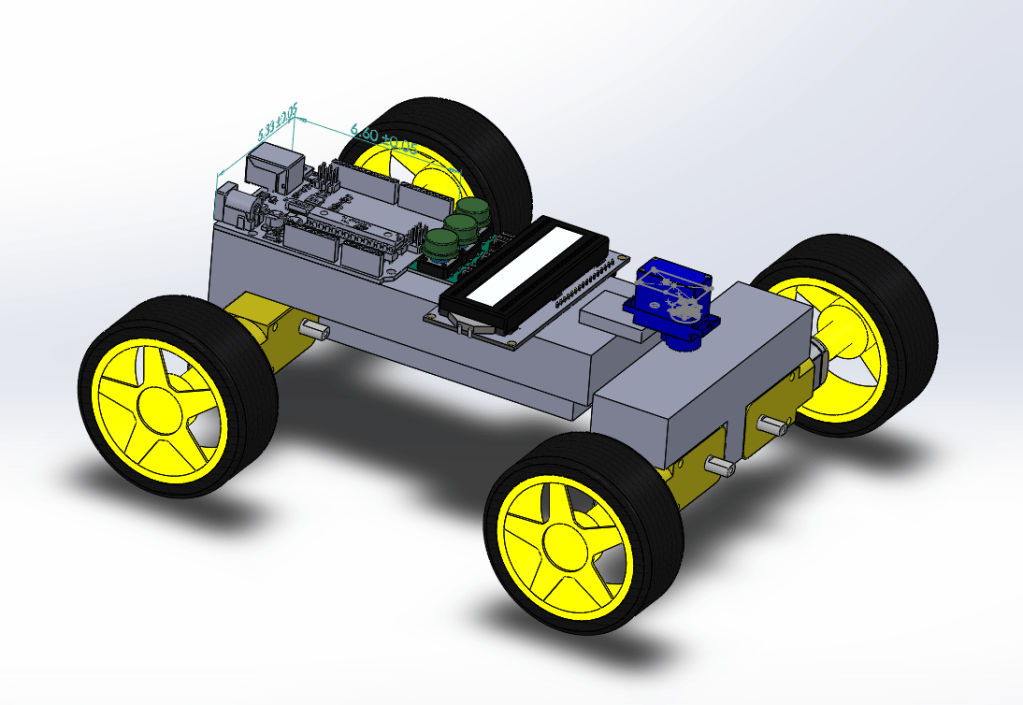
The final CAD prototype was shown in the previous article; however, we will put it here as well to save you the hassle of having to go back. Some comments we had about the initial prototype and this prototype shown below are discussed in the previous posts and so we would encourage you to check them out if you haven’t!

Teaching Manual


The whole concept of the teaching manual was built on having an interactive picture book that was colorful and easy to read. As such, we used the template of an architecture look book to get the easy to read fonts and ample space for our images. This is what we presented to our users and community partner Benedict.
The feedback from the previous assignment (or, lack thereof, given that people didn’t realize the word document was our prototype) allowed us to create something that stood out a bit more and was more recognizable as a picture book or as a teaching manual. This was the most important thing.
We presented these things (teaching manual + CAD model) to our users: a 14 year old male and a 12 year old female. Highlights of their feedback are listed below.
- A suggestion to make coding the robot more interactive and less “copy-and-paste”
- Some steps were unclear (this is because we couldn’t actually build the robot and had to rely on CAD assembly files to help relay our message across)
- A suggestion to add a voiceover that talks the user through how to build and code the robot
While these were amazing suggestions, the only feedback we could work on due to proximity and material constraints was #1, which was vastly improved in our next teaching manual as it explained the code line by line.

We also presented the same set of deliverables to our community partner, Benedict. Please find below a summary of his feedback.
- Explaining the code section by section before putting it all together so the user feels part of the process
- Making the headings of the manual clear and easy to understand so that the user understands when the transitions are
These feedback points were quite helpful and we implemented them. After doing so, we realized that, indeed, it improved the understandability of our manual! This is one major thing we have learned from this class, that taking feedback is a good thing if you want to make sure that you produce your best.
These things can be found in a OneDrive folder (in case you want to see a close-up of the deliverables). We might include it in a next post if someone asks!
All too soon, we’ve come to the end of a lovely journey (though, there might be some more posts in the future just to see how we’re all doing 😉). We hope you’ve learned as much as we have. Until next time!